Example Based 3D Reconstruction from Single 2D Images
Published in Beyond Patches Workshop at IEEE Conference on Computer Vision and Pattern Recognition (CVPR), New-York, 2006
Recommended citation: Tal Hassner and Ronen Basri. Example Based 3D Reconstruction from Single 2D Images, Beyond Patches Workshop at IEEE Conference on Computer Vision and Pattern Recognition (CVPR), New-York, 2006.
Abstract
We present a novel solution to the problem of depth reconstruction from a single image. Single view 3D reconstruction is an ill-posed problem. We address this problem by using an example-based synthesis approach. Our method uses a database of objects from a single class (e.g. hands, human figures) containing example patches of feasible mappings from the appearance to the depth of each object. Given an image of a novel object, we combine the known depths of patches from similar objects to produce a plausible depth estimate. This is achieved by optimizing a global target function representing the likelihood of the candidate depth. We demonstrate how the variability of 3D shapes and their poses can be handled by updating the example database on-the-fly. In addition, we show how we can employ our method for the novel task of recovering an estimate for the occluded backside of the imaged objects. Finally, we present results on a variety of object classes and a range of imaging conditions.
Some Results
More results can be found in the paper.
 |  | 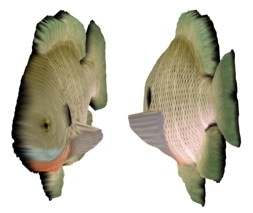 |
| Input image | Our depth estimate (rendered in 3D) | Textured renderings of our depth estimate |
 |  |  |
| Input image | Our depth estimate (rendered in 3D) | Our depth estimate for the back of the hand |